

苏晨 传红
“智能驾驶按照产业演进,可以被分为车端竞争到云端竞争两个阶段。车端竞争阶段主要围绕电子电气架构、算力、传感器、算法等。这个阶段,由于主机厂的车队保有量和数据量均不大,对云端要求不高。云端竞争阶段则主要围绕算力、算法、车云整合、生态能力。由于车队保有量、数据量巨大,对云端算力需求指数级增长,云端主要进行算法训练、生态应用。这个阶段头部效应会强化,算法会进一步拉开差距。”
01
落地场景之争:
Robotaxi和消费市场
场景是汽车智能化最先需要考虑的因素之一,场景决定数据量,数据量决定迭代速度。目前行业分为两种路线。
一种路线是Robotaxi(自动驾驶出租车,又称共享无人车)和高端乘用车市场,Robotaxi目标是直接替代司机,技术路线比较激进。Robotaxi路线代表企业有谷歌、百度、小马智行等,主要来自于互联网行业,无汽车生产资质。
另一种路线是ADAS(高级驾驶辅助系统)渐进性路线,渐进式乘用车路线代表企业有特斯拉、ME、华为等。
总体而言,渐进式消费市场产品迭代速度占优。
首先,从市场空间来看,两种路线总量旗鼓相当,渐进式路线落地速度快。Robotaxi可通过替代司机节约成本。2020年,国内价格20万以上乘用车年销量约630万,30万以上销量约277万,市场份额分别为30%、13%。我们假设全球市场价格20万以上乘用车销量份额为20%,30万以上为8%,则全球价格20万以上、30万以上汽车年销量为1800万、720万。可以看出,全球出租和网约车需求巨大。但是,替代司机从技术上看比较困难,落地时间较晚。定位做Robotaxi场景的公司,由于正式投入运营需要替代司机(不带安全员),实际落地场景有限且较慢。
其次,从运营车数量来看,头部公司之间有两个数量级的差异。目前全球头部的Robotaxi车队数量约600台,未来3年内可能达到3000台,落地速度较慢、车队数量少。相比之下,目前,特斯拉保有量近100万台,2021年底预计将达到200万台左右,与Robotaxi车队数量相差1000倍。
再次,从数据量来看,两种路线存在数量级差异。目前全球头部的Robotaxi车队数量约600台,未来3年内可能达到3000台,落地速度较慢、车队数量少,年度运营里程预计在1亿公里级别。而2025年全球头部的消费市场龙头特斯拉,年里程预计达千亿级别。根据测算,Robotaxi的盈亏平衡点约48000台,消费市场的盈亏平衡点在年销量20万台左右。Robotaxi盈亏平衡点显著低于消费市场。从Robotaxi的实际运营数量和消费市场头部公司销量看,Robotaxi盈亏平衡点出现较晚,因为离不开安全员和实际运营数量难以达标。

依靠算法迭代优势,特斯拉等企业有机会从消费市场切入Robotaxi,重构整个产业。特斯拉在2020年全年业绩报告电话会中指出,随着特斯拉全自动驾驶(FSD)技术的改进,特斯拉所卖出的汽车将会变成Robotaxi,从而使特斯拉汽车的使用率从每周12小时增加至每周60小时。特斯拉可以从这些变成为Robotaxi的车辆中收取额外的费用(以每英里约1美元的服务价格,以每英里0.18美元的成本运营),进而增加更多的公司收入,而特斯拉汽车的消费者也能通过出租来享受额外的收入。马斯克曾在2020年表示,将在2020年底部署100万辆Robotaxi,但该计划还在等待政府监管部门的审核。
02
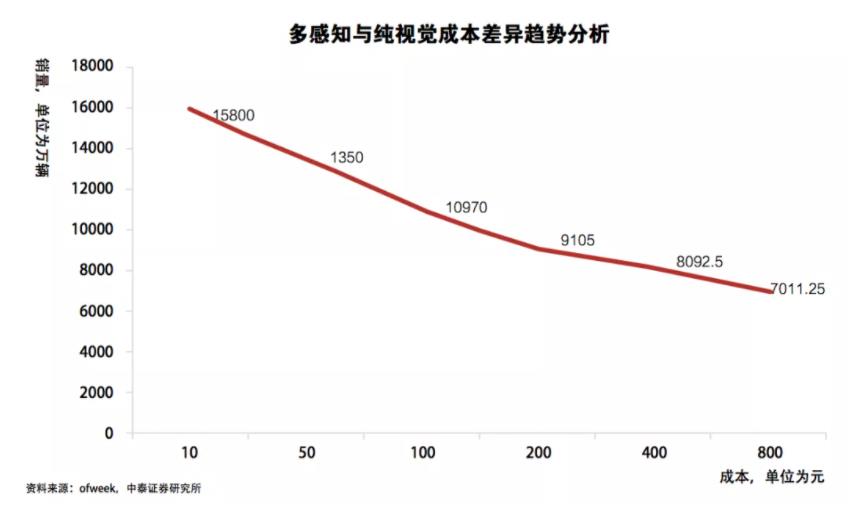
产品路线之争:
纯视觉和激光多感知融合
纯视觉和激光为代表的多感知融合,并没有太多技术上的分歧,更多是对商业化路径选择的不同。
在车端,减少2-3个激光雷达,传感器成本至少降低2-4万元。而当视觉算法识别语义种类和精确度要求提升,芯片算力要求成本的提升大约为4000元。
在云端,视觉数据量大,算法要求高,需要利用高质量和大规模数据在云端进行仿真和训练,纯视觉的成本会更高。
也就是说,纯视觉车端成本低,云端成本高,用算法弥补传感器的不足。激光多感知方案正好相反,是用感知硬件弥补算法的不足。多感知方案具备安全冗余优势,同时在初期能够在体验上弥补算法的差距。
根据安森美的报告,L1-L2等级下ADAS摄像头价值量为40美金。目前,激光雷达单价3000美元以上;77GHz毫米波雷达单价约1000元,24GHz毫米波雷达单价约500元;超声波雷达单价不超过百元。在L1-L2等级下,如果是纯视觉方案,比如特斯拉采用“8颗摄像头+1颗毫米波雷达+12个超声波传感器”,预计成本约3200元。如果是多感知融合方案,比如小鹏P5采用“2个激光雷达+5个毫米波雷达+12个超声波雷达+13个摄像头”,预计成本为4.9万。
根据安森美的报告,L3、L4摄像头的价值量分别可能达到180美金和200美金。由于自动驾驶级别提高,纯视觉和多感知融合两类方法均需要算法和激光雷达配合,因此预计成本相同。
03
产业演进:车端到云端
智能驾驶按照产业演进,可以被分为车端竞争到云端竞争两个阶段。
车端竞争阶段(2020-2025年)主要围绕电子电气架构、算力、传感器、算法等。这个阶段,由于主机厂的车队保有量和数据量均不大,对云端要求不高。竞争主要靠汽车产品和品牌的定义,主要面向售价20万以上的消费市场。这个阶段,部分产品转型慢的主机厂会逐步被边缘化。
云端竞争阶段(2025年后)主要围绕算力、算法、车云整合、生态能力。由于车队保有量、数据量巨大,对云端算力需求指数级增长,云端主要进行算法训练、生态应用。这个阶段头部效应会强化,算法会进一步拉开差距,生态应用等边际收益递增的功能越来越多(社交、V2X、REM等),Robotaxi开始逐步普及。
车端竞争要素是架构、算力、算法、传感器。
电气架构趋势是算力向中央集中,向云端集中,简化底层硬件、解耦软硬件。在电气架构方面,特斯拉率先实现中央域集成,大众等正逐步向域集成演进,国内电气架构迭代相对落后。
算力方面,自动驾驶的算力需求正在快速增长:L2级别需要算力约2 TOPS(处理器运算能力单位),L3需要24 TOPS,L4为320 TOPS,L5为1000+TOPS。以主流车企芯片算力为例。蔚来ET7搭载的超算平台ADAM,集成了4颗英伟达Orin芯片,总算力1016 TOPS。2颗芯片为主控芯片,负责自动驾驶系统运算;1颗为实时冗余备份芯片,保证安全性;1颗为群体智能与个性训练专用芯片,实现算法整体升级和单车个性化本地训练。特斯拉Hardware3.0版本集成了2颗FSD芯片,总算力达144 TOPS。计划22年推出Hardware4.0,预计算力达到432 TOPS。
算法是影响智能化体验的最关键因素之一。未来算法的差异化主要由数据量大小和算法的种类和冗余部署决定。前者影响云端算法训练,后者影响智能化的精准度。

传感器方面,摄像头主要围绕帧率、像素等竞争,激光主要围绕成本竞争。软件层面,因为多传感器融合技术要求很高的数据处理与容错性,算法需要足够强大。要做到信息获取冗余且充分,在硬件层面则对传感器数量有一定要求。
多传感器信息融合技术的基本原理类似于人体大脑在综合处理信息的过程。通过利用多源数据进行合理支配与分析,将各种传感器进行多层次、多空间的信息互补和优化组合处理,最终形成对观测环境的一次性解释。
多传感器技术分为前融合算法与后融合算法。后融合算法下,每个传感器独立处理生成的目标数据,且每个传感器都有自己所独立的感知,最后当所有传感器完成目标数据生成后,再有主处理器进行数据融合。前融合算法的难点在于只通过一个感知算法将所有多维获得的综合数据进行感知。我们可以将前融合技术理解为打造一个超级传感器,它将所有数据在原始层融合在一起,这个传感器既有能力感知雷达的三维信息又可以感知摄像头等。前融合技术较后融合技术因技术较为复杂,壁垒强大。
多传感器融合技术的优势在于利用多个传感器相互协同的功能将基于各个传感器获得的分离观测信息,通过技术(将信息多级别、多方面组合)使得这些分离信息导出更多有用信息,进而提升整个传感器系统的智能化。
作者简介
苏晨、陈传红,中泰证券研究所。
